2026
-
 Multi-Task Optimization over Networks of TasksIn PPSN, 2026
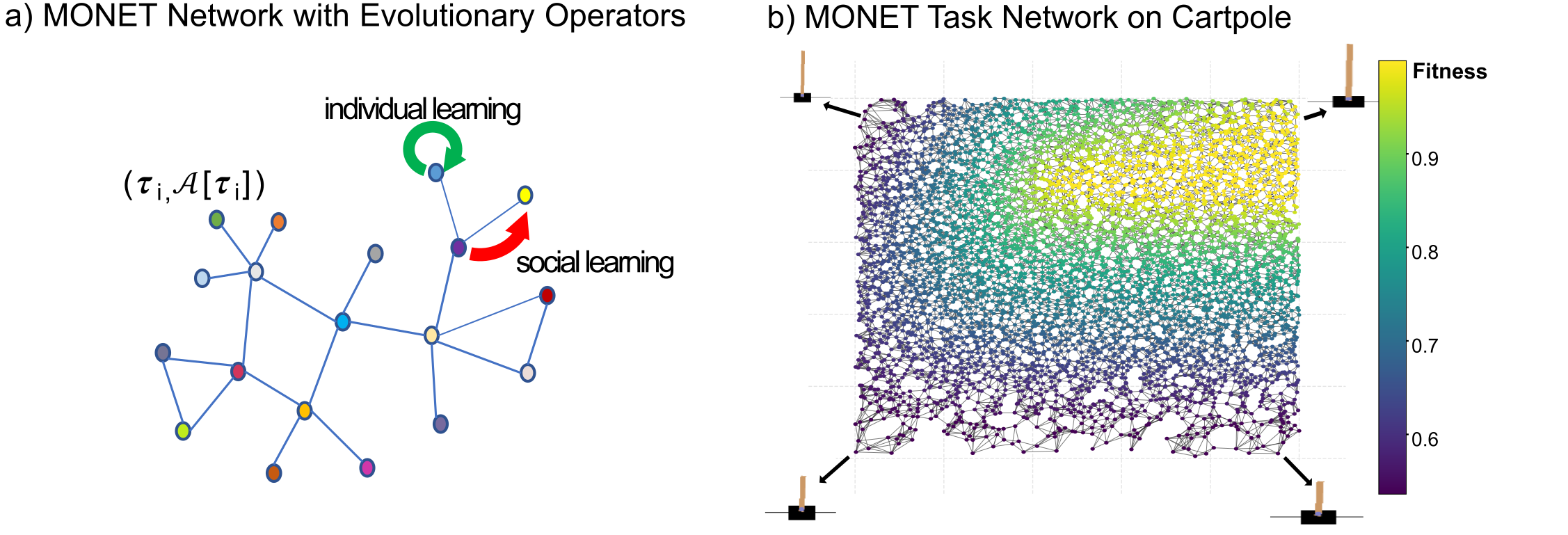
Multi-Task Optimization over Networks of TasksIn PPSN, 2026Multi-task optimization is a powerful approach for solving a large number of tasks in parallel. However, existing algorithms face distinct limitations: Population-based methods scale poorly and remain underexplored for large task sets. Approaches that do scale beyond a thousand tasks are mostly MAP-Elites variants and rely on a fixed, discretized archive that disregards the topology of the task space. We introduce MONET (Multi-Task Optimization over Networks of Tasks), a multi-task optimization algorithm that models the task space as a graph: tasks are nodes, and edges connect tasks in the task parameter space. This representation enables knowledge transfer between tasks and remains tractable for high-dimensional problems while exploiting the topology of the task space. MONET combines social learning, which generates candidates from neighboring nodes via crossover, with individual learning, which refines a node’s own solution independently via mutation. We evaluate MONET on four domains (archery, arm, and cartpole with 5,000 tasks each; hexapod with 2,000 tasks) and show that it matches or exceeds the performance of existing MAP-Elites-based baselines across all four domains.
@inproceedings{hatzky2026multitaskoptimizationnetworkstasks, title = {Multi-Task Optimization over Networks of Tasks}, booktitle = {PPSN}, author = {Hatzky, Julian and Bartz-Beielstein, Thomas and Eiben, A. E. and Yaman, Anil}, year = {2026}, eprint = {2604.21991}, archiveprefix = {arXiv}, primaryclass = {cs.LG}, url = {https://arxiv.org/abs/2604.21991}, }
2023
-
 A Multi-brain Approach for Multiple Tasks in Evolvable RobotsIn Applications of Evolutionary Computation, 2023
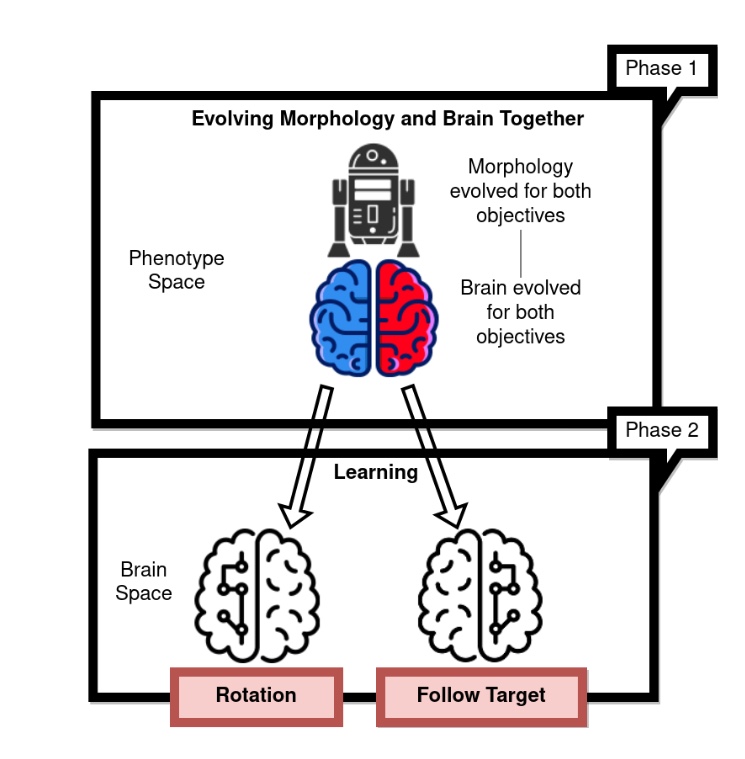
A Multi-brain Approach for Multiple Tasks in Evolvable RobotsIn Applications of Evolutionary Computation, 2023We investigate the joint evolution of morphologies (bodies) and controllers (brains) of modular robots for multiple tasks. In particular, we want to validate an approach based on three premises. First, the controller is a combination of a user-defined decision tree and evolvable/learnable modules, one module for each given task. Second, morphologies and controllers are evolved jointly for each task simultaneously by a multi-objective evolutionary algorithm. Third, after terminating the evolutionary process, the brain of the users’ favorite morphology is optimized by a learning algorithm applied to the task-specific controller modules independently.
@inproceedings{10.1007/978-3-031-30229-9_9, author = {{de Bruin}, Ege and Hatzky, Julian and Hosseinkhani Kargar, Babak and Eiben, A. E.}, editor = {Correia, Jo{\~a}o and Smith, Stephen and Qaddoura, Raneem}, title = {A Multi-brain Approach for Multiple Tasks in Evolvable Robots}, booktitle = {Applications of Evolutionary Computation}, year = {2023}, publisher = {Springer Nature Switzerland}, address = {Cham}, pages = {129--144}, isbn = {978-3-031-30229-9}, }