2023
-
 A Multi-brain Approach for Multiple Tasks in Evolvable RobotsIn Applications of Evolutionary Computation, 2023
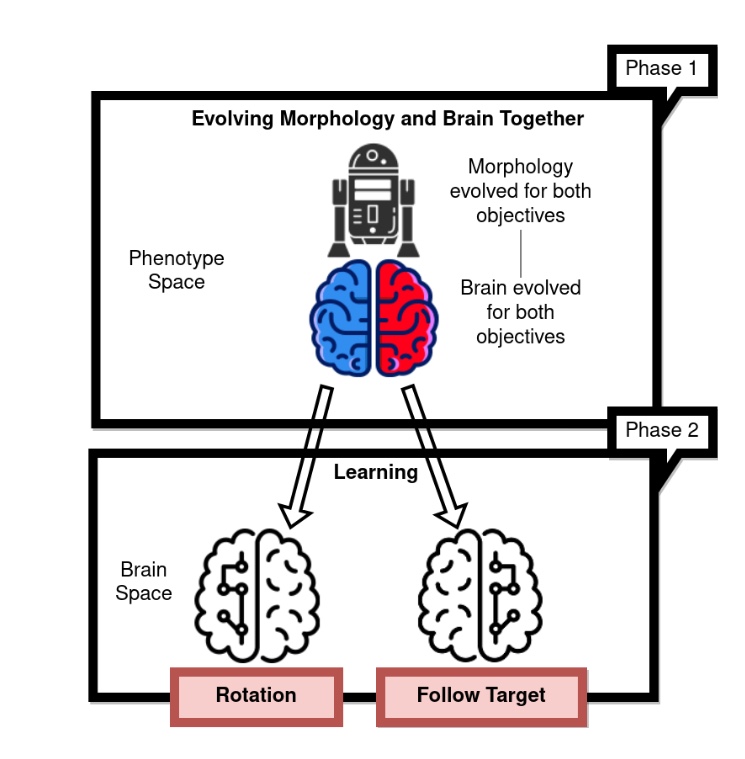
A Multi-brain Approach for Multiple Tasks in Evolvable RobotsIn Applications of Evolutionary Computation, 2023We investigate the joint evolution of morphologies (bodies) and controllers (brains) of modular robots for multiple tasks. In particular, we want to validate an approach based on three premises. First, the controller is a combination of a user-defined decision tree and evolvable/learnable modules, one module for each given task. Second, morphologies and controllers are evolved jointly for each task simultaneously by a multi-objective evolutionary algorithm. Third, after terminating the evolutionary process, the brain of the users’ favorite morphology is optimized by a learning algorithm applied to the task-specific controller modules independently.
@inproceedings{10.1007/978-3-031-30229-9_9, author = {{de Bruin}, Ege and Hatzky, Julian and Hosseinkhani Kargar, Babak and Eiben, A. E.}, editor = {Correia, Jo{\~a}o and Smith, Stephen and Qaddoura, Raneem}, title = {A Multi-brain Approach for Multiple Tasks in Evolvable Robots}, booktitle = {Applications of Evolutionary Computation}, year = {2023}, publisher = {Springer Nature Switzerland}, address = {Cham}, pages = {129--144}, isbn = {978-3-031-30229-9}, }